General framework
- $ P (\mathcal{X}) $
- $ Y \subseteq \mathcal{X} $
- $ y \in Val(Y) $
- $ D = \{ \xi[1], \dots \xi[M] \}: M $ samples from $ P, \xi [i] \sim P $
Goal: Estimate $ P(Y) = y $.
Generally: Estimate the expectation of some $ f(x) $ relative to $ P $.
- To compute $ P(Y = y) $, choose $ f(\xi) = I \{ \xi (Y) = y \} $,
$$
\begin{align*}
E_{\xi \sim P}[f(\xi)]
&\approx E_{\xi \sim D} [f(\xi)] \quad \text{(empirical approximation)}\\
&= \frac{1}{M} \sum_{1}^{M} f(\xi) = \frac{1}{M} \sum_{1}^{M} I\{ \xi(Y) = y \} \\
&= P(Y = y)
\end{align*}
$$
Indicator function example
$$
I\{ \xi(Y) = y \} =
\begin{cases}
1 \quad \text{if } \xi (Y) = y \\
0 \quad \text{otherwise}
\end{cases}
$$
- $ \mathcal{X} = \{ X_1, X_2, X_3 \} $
- one sample/particle: $ \xi = \{ X_1 = 0, X_2 = 1, X_3 = 1 \} $
- $ Y = \{ X_1, X_3 \} $
$$
\xi (Y) = \{ X_2 = 1, X_3 = 1 \}
$$
If
$$
y = \{ X_2 = 1, X_3 = 1 \}
$$
Then
$$
I\{ \xi(Y) = y \} = 1
$$
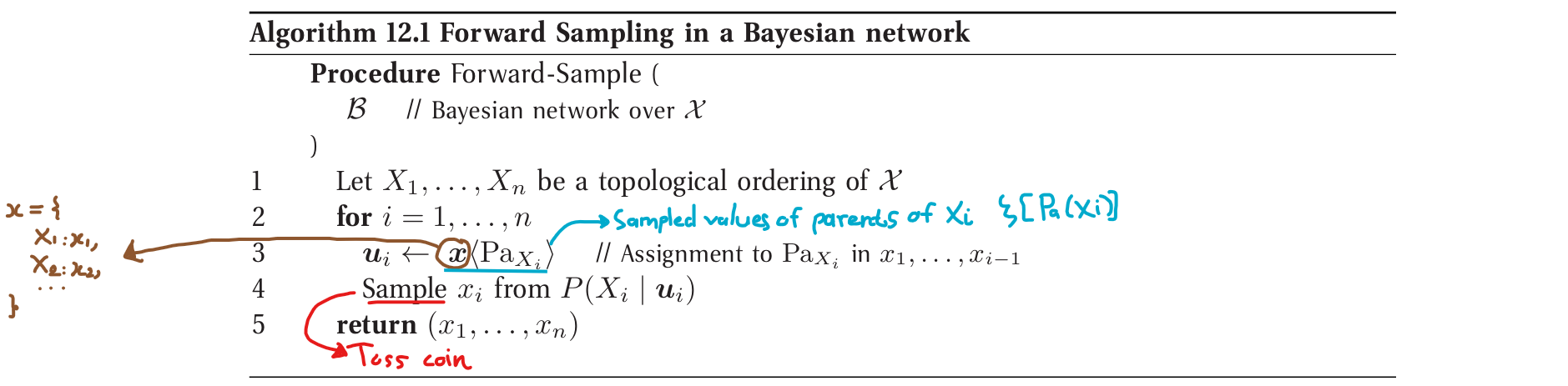
Forward Sampling
- Generate random samples $ \xi[1], \dots, \xi[M] $ from the distribution $ P(\mathcal{X}) $
- difficulties in generating samples from the posterior $ P(\mathcal{X} \mid e) $
FW-Sampling from a BN
Student Example
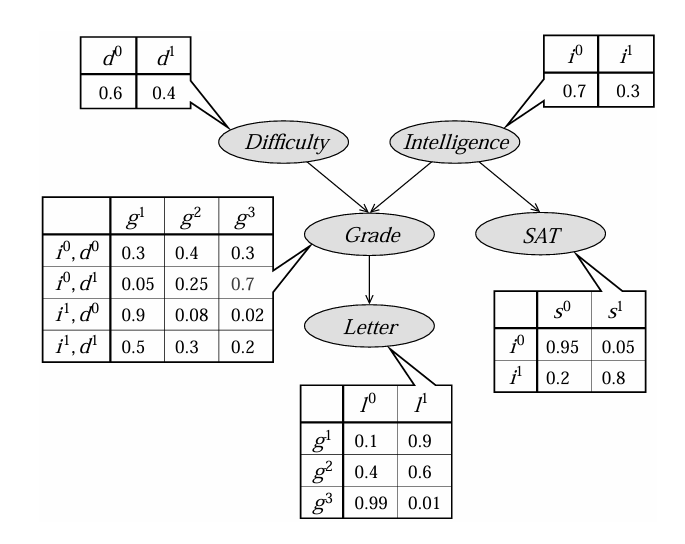
Sampling $ D $
toss a coin that land heads $ (d^1) $ 40% of the time and tails $ (d^0) $ 60%, assume tail landed $ \rightarrow \xi[D] = d^0 $
Sampling $ I $
assume $ \xi[I] = i^1 $
Sampling $ G $
Given $ d^0, i^1 \rightarrow $ Choose $ P(G \mid d^0, i^1) $ to sample.
…
Sampling from a Discrete Distribution
TODO: CS 109 or theprobabilitycourse sampling
Analysis of Error
- $ D = \{ \xi[1], \dots, \xi[M] \} $ generated via Forward-sampling
- Estimate $ P(Y = y) $
- $ I\{ \xi [m] (Y) = y \} \sim Bernoulli(P(y)) $, IID
- because $ I = 1 $ with probability $ P (I = 1) = P (\xi [m] (Y) = y) = P(y) $ and $ 0 $ otherwise.
$ \rightarrow $ can estimate the expectation of any $ f $
$$
\hat{E_D} (f) = \frac{1}{M} \sum_{m = 1}^{M} f (\xi[m])
$$
FW-Sampling Estimator
Approximation of the desired probability.
In case of computing $ P(y) $, $ f $ counts # of times we see $ y $:
$$
\boxed{ \hat{P_D} (y) = \frac{1}{M} \sum_{m = 1}^{M} I \{ y[m] = y \} } \tag{12.2}
$$
- $ y[m] $: denotes $ \xi [m] (Y) $ - the assignment to $ Y $ in the particle $ \xi [m] $
$ \Rightarrow $ apply the Hoeffding bound and Chernoff bound to show that this estimate is close to the truth with high probability.
Hoeffding bound
Measures the absolute error $ |\hat{P_D} - P(y)| $
$$
\boxed{ P_D (\hat{P_D} \notin [P(y) - \epsilon, P(y) + \epsilon]) \leq 2 e^{-2M \epsilon^2} }
$$
- $ P_D (.) $: Probability of error (getting a bad sample set)
- $ (\hat{P_D} \notin [P(y) - \epsilon, P(y) + \epsilon]) $: the estimator is $ \epsilon $ away from $ p $
We want:
$$
P_D (\hat{P_D} \notin [P(y) - \epsilon, P(y) + \epsilon]) \leq \delta
$$
- $ \delta $: failure tolarence, a small value.
Thus, we set:
$$
\begin{align*}
&\phantom{\leftrightarrow} 2 e^{-2M \epsilon^2} \leq \delta \\
&\Leftrightarrow -2M \epsilon^2 \leq \ln (\delta / 2)\\
&\Leftrightarrow \boxed{ M \geq \frac{\ln (2/s)}{2 \epsilon^2} }
\end{align*}
$$
ℹ️
If $ M \geq \frac{\ln (2/s)}{2 \epsilon^2} $, we are guaranteed to get a good (within $ \epsilon $) estimator with probability $ \geq 1 - \delta $ that only relies on $ (\epsilon, \delta) $ (does not rely on $ P(y) $).
Chernoff bound
$$
\boxed{ P_D (\hat{P_D} \notin P(y)(1 \pm \epsilon)) \leq 2 e^{-2M P(y) \epsilon^2/3} }
$$
$$
\Leftrightarrow \boxed{ M \geq 3 \frac{\ln (2/ \delta)}{p \epsilon^3} }
$$
Conditional Probability Queries
Conditional probabilities of the form $ P(y \mid E = e) $
Likelihood Weighting and Importance Sampling
Try: When sampling a node $ X_i $ whose value has been observed, set $ X_i $ to its observed value.
Assume evidence is $ s^1 $
- Sample $ D, I $ using naive fw-sampling process
- set $ S = s^1 $
- then sample $ G, L $.
$ \Rightarrow $ all of the samples will have $ S = s^1 $
Problem:
- The posterior probability of $ i^1 $ (smart student) should be higher when observed $ s^1 $ (high SAT score).
- But in fact, expected # of sample that have $ I = i^1 $ will still be 30%.
Ituition Example
$ E = \{ l^0, s^1 \} $
Assume
- sample $ D = d^1, I = i^0 $
- set $ S = s^1 $
- sample $ G = g^2 $
- set $ L = l^0 $
The probability that, given $ I = i^0 $, fw-sampling generated $ S = s^1 $:
$$
P(s^1 \mid i^0) = 0.05
$$
The probability that, given $ G = g^2 $, fw-sampling generated $ L = l^0 $:
$$
P(l^0 \mid i^0, g^2) = P(l^0 \mid g^2) \quad (\text{because } L \perp I \mid G) = 0.4
$$
Each of these events is the result of an independent coin toss. Thus the weight required for this sample to compensate for the setting of the evidence:
$$
P(s^1, l^0 \mid i^0, g^2) = P(s^1 \mid i^0, g^2) \cdot P(l^0 \mid i^0, g^2) = P(s^1 \mid i^0) \cdot P(l^0 \mid g^2) = 0.05 \times 0.4 = 0.02
$$
Likelihood Weighting
The weight of samples are derived from the likelihood of the evidence accumulated throughout the sampling process.
This process generates a weighted particle.
Estimate a conditional probability $ P(y \mid e) $ using LW-Sample $ M $ times $ \rightarrow $ generate a set $ D = \{ \langle \xi[1], w[1] \rangle, \dots, \langle \xi[M], w[M] \rangle \} $ of weighted particles.
LW Estimator
$$
\boxed{ \hat{P_D} (y \mid e) = \frac{\sum_{m = 1}^{M} w[m] I\{ y[m] = y \}}{\sum_{m = 1}^{M} w[m]} }
$$
This is a generalization of the one used for unweighted particles in (12.2).
Importance Sampling
Estimate the expectation of a function $ E[f(x)] $ relative to some target distribtuion $ P(X) $
- by generating samples $ x[1], \dots, x[M] $ from $ P $, then estimate
$$
\boxed{ E_P[f] \approx \frac{1}{M} \sum_{m = 1}^{M} f( x[m] ) }
$$
❗
$ P $ might be
- a posterior distribution for a BN,
- or a prior distribution for a Markov network.
$ \rightarrow $ impossible or computationally very expensive to generate sample from $ P $.
Thus, we might prefer to generate samples from a different distribution $ Q $ a.k.a the proposal distribution or sampling distribution.
Unormalized Importance Sampling
The sampling distribution $ Q $ is incorrect $ \rightarrow $ can’t avg the $ f $-value of the samples generated.
Observe
$$
E_{P(X)} [f(X)] = E_{Q(X)} \left[f(X) \frac{P(X)}{Q(X)} \right]
$$
verify
$$
\begin{align*}
E_{Q(X)} \left[ f(X) \frac{P(X)}{Q(X)} \right] &= \sum_x Q(x) f(x) \frac{P(x)}{Q(x)}\\
&= \sum_x P(x) f(x)\\
&= E_P [f(X)]
\end{align*}
$$